A recent project involving robots, Linux Servers, ROS, and 3D printed gearboxes.
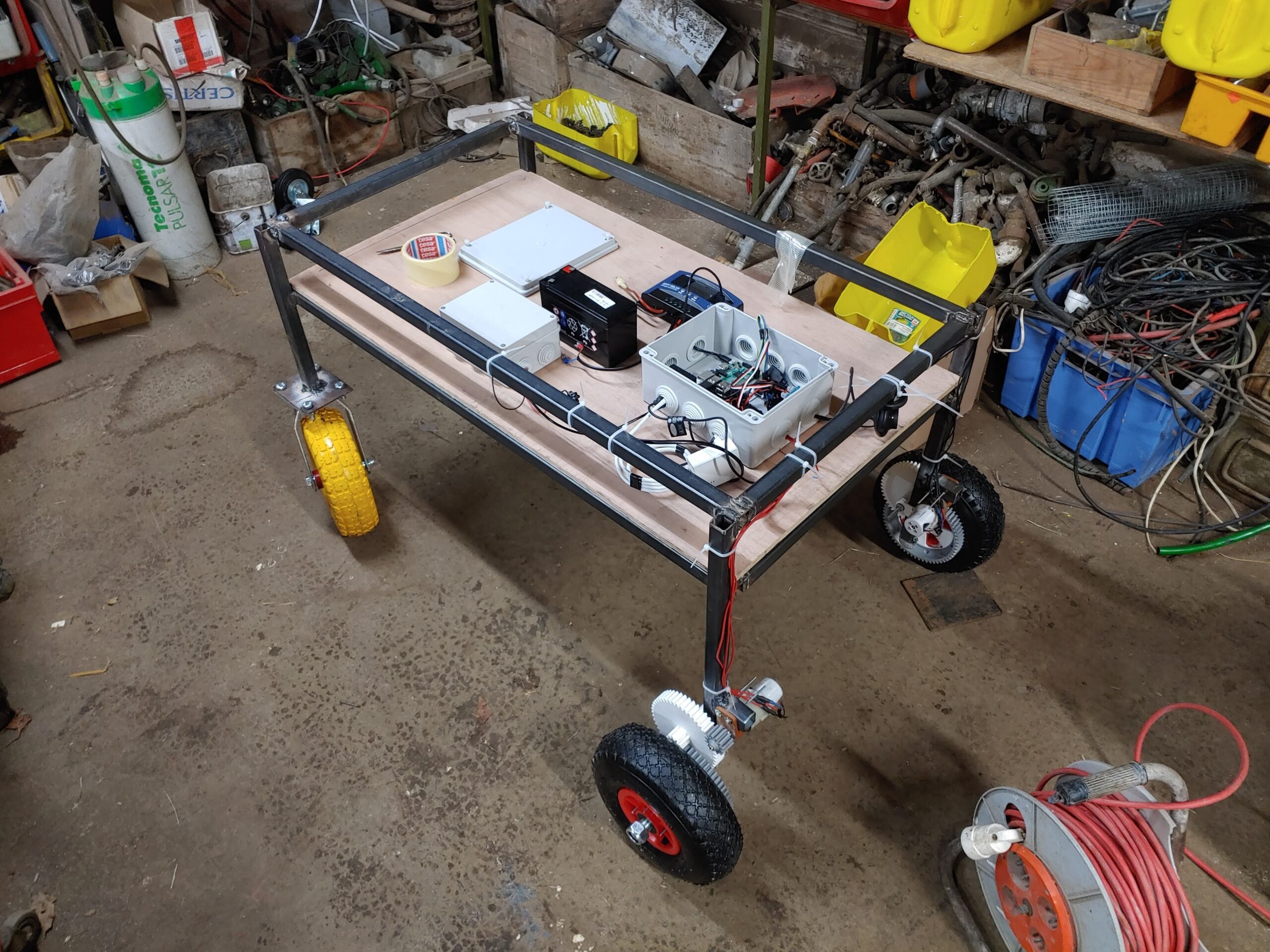
The robot is running off of one 280W solar panel, which is more than enough to fry that 6Ah gel battery in full sun. It has been switched out prior to operation.
The brains of the robot consist of one single raspberry pi, with an Arduino being used as a more convenient hardware interface. Two ESCs are directly connected to the raspberry pi’s GPIO however as PWM is quite straightforward. These run a pair of 200W, 900kv brushless motors, running through two repurposed drill chuck 16:1 planetary gear reductions, with an added two steps of 5:1 gear reductions for a total 400:1 gear reduction, allowing for a top speed of just about 1.5 km/h, a compromise for added torque.




This fusion 360 model is quite unimpressive (as of January 2021). The design is built to be modular, and can be assembled in such a way that tolerances can be adjusted for through sliding interfaces. This allows for minimal interdependency on parts and a much simpler design process. More parts will be added in the future as I would like to be able to add tools to the underside.
A delta pick and place robot is one of the tools currently being considered due to its mechanical simplicity and being able to spray pesticides in a much more targeted way. Other tools and methods may be considered however.
The Fusion 360 model below should be updated should upgrades be implemented